概要
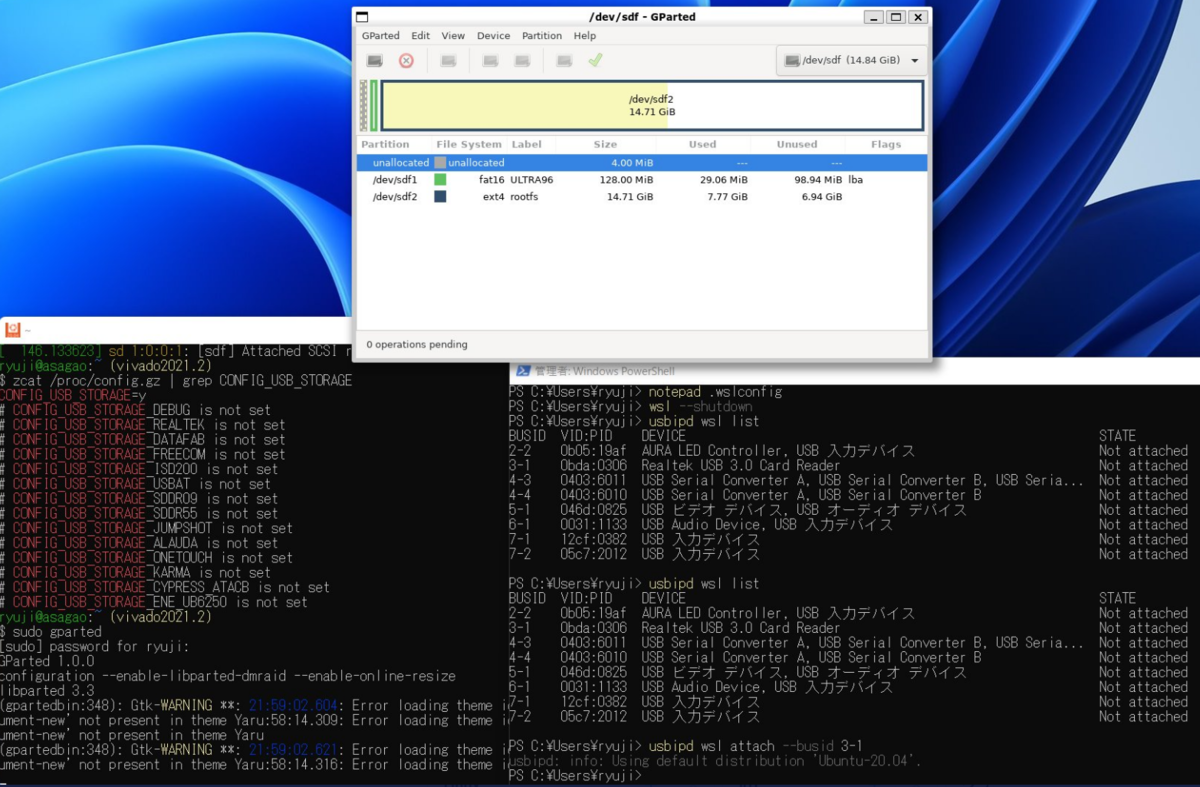
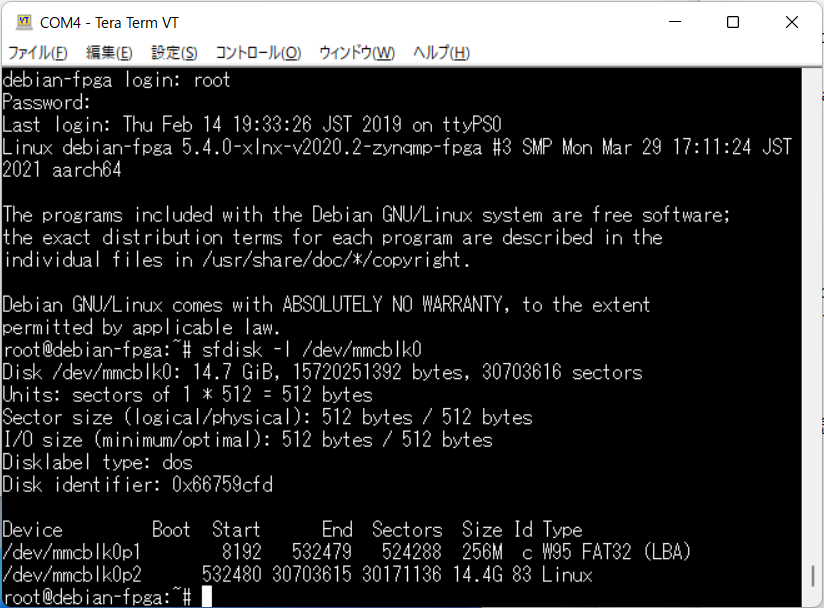
以前、[こんな記事]https://ryuz.hatenablog.com/entry/2022/04/30/213444を書きましたが、その際、実 SD カードにイメージを作ってから dd コマンドでイメージを保存していました。
もちろんもっといいやり方はあるだろうなとは思っていたのですが、「Win32DiskImager 使えると便利」とか言ってる時点でもともと Linux には詳しくなく。
そんなときに下記の話を見かけたので、ちょっとだけ挑戦中です。
読んでる。ZynqMP-FPGA-Linux や FPGA-SoC-Linut のブートイメージを作るのに参考にしたい。「SDカードイメージの作成」 https://t.co/y5p1RKgeeL #Qiita @miuraより
— 隠居したエンジニア (@ikwzm) 2022年6月16日
やってみたこと
まだ動作確認までしていないので備忘録レベルですが。
こんな感じでイメージ作れないかな?
#!/bin/bash
VERSION="2021.1.1"
TAG="v2021.1.1"
IMG_FILE="ultra96v2-debian-v2021.1.1.img"
TGZ_FILE="ZynqMP-FPGA-Linux-${TAG}.tar.gz"
# ZynqMP-FPGA-Linux-v2021.1.1.tar.gz
if [ ! -f $TGZ_FILE ]; then
# wget -O $TGZ_FILE https://github.com/ikwzm/ZynqMP-FPGA-Linux/archive/refs/tags/$TAG.tar.gz
wget -O $TGZ_FILE 'https://onedrive.live.com/download?cid=E643EA309C96C6F6&resid=E643EA309C96C6F6%2142121&authkey=ACAH_X1CZF8a6fU'
fi
tar zxvf $TGZ_FILE
DEV_LOOP=`sudo losetup -f`
rm -f $IMG_FILE
truncate -s 6GiB $IMG_FILE
sudo losetup $DEV_LOOP $IMG_FILE
sudo parted $DEV_LOOP -s mklabel msdos -s mkpart primary fat32 1048576B 315621375B -s mkpart primary ext4 315621376B 100% -s set 1 boot
sudo mkfs.vfat ${DEV_LOOP}p1
sudo mkfs.ext4 ${DEV_LOOP}p2
sudo mkdir -p /mnt/usb1
sudo mkdir -p /mnt/usb2
sudo mount ${DEV_LOOP}p1 /mnt/usb1
sudo mount ${DEV_LOOP}p2 /mnt/usb2
cd ZynqMP-FPGA-Linux-${VERSION}
sudo cp target/Ultra96-V2/boot/* /mnt/usb1
sudo tar xfz debian11-rootfs-vanilla.tgz -C /mnt/usb2
sudo mkdir /mnt/usb2/home/fpga/debian
sudo cp linux-image-5.4.0-xlnx-v2020.2-zynqmp-fpga_5.4.0-xlnx-v2020.2-zynqmp-fpga-3_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp linux-headers-5.4.0-xlnx-v2020.2-zynqmp-fpga_5.4.0-xlnx-v2020.2-zynqmp-fpga-3_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp fclkcfg-5.4.0-xlnx-v2020.2-zynqmp-fpga_1.7.2-1_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp u-dma-buf-5.4.0-xlnx-v2020.2-zynqmp-fpga_3.2.4-0_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp linux-image-5.10.0-xlnx-v2021.1-zynqmp-fpga_5.10.0-xlnx-v2021.1-zynqmp-fpga-4_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp linux-headers-5.10.0-xlnx-v2021.1-zynqmp-fpga_5.10.0-xlnx-v2021.1-zynqmp-fpga-4_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp fclkcfg-5.10.0-xlnx-v2021.1-zynqmp-fpga_1.7.2-1_arm64.deb /mnt/usb2/home/fpga/debian
sudo cp u-dma-buf-5.10.0-xlnx-v2021.1-zynqmp-fpga_3.2.4-0_arm64.deb /mnt/usb2/home/fpga/debian
sudo mkdir /mnt/usb2/mnt/boot
sudo sh -c "cat <<EOT >> /mnt/usb2/etc/fstab
/dev/mmcblk0p1 /mnt/boot auto defaults 0 0
EOT"
sudo umount /mnt/usb1
sudo umount /mnt/usb2
sudo losetup -d $DEV_LOOP